 English
English русский
русский Español
Español 简体中文
简体中文Sistemas de microagarre
- Utiliza pinza neumática.
- Abrazadera de bolas de acero
- Fuerza de retención: 70N



Utiliza una pinza neumática y tiene una abrazadera de bola de acero.
El tamaño de su cuello es de 8 mm, la fuerza de retención es de 70 N, soporta voltaje de 1 MPa y el peso es de 8 g.
La micropinza es liviana y tiene un diseño compacto. Puede maximizar su capacidad sin afectar la capacidad de manipulación del robot.
El rango de temperatura de uso estándar es de 0 ℃ -70 ℃, el rango de uso de alta temperatura es de 0 ℃ -120 ℃.
Es adecuado para la manipulación de robots de automatización.

Utiliza pinza neumática;

La micropinza es liviana y tiene un diseño compacto. Puede maximizar su capacidad sin afectar la capacidad de manipulación del robot;

Tiene abrazadera de bola de acero;
Es adecuado para la manipulación de robots de automatización.
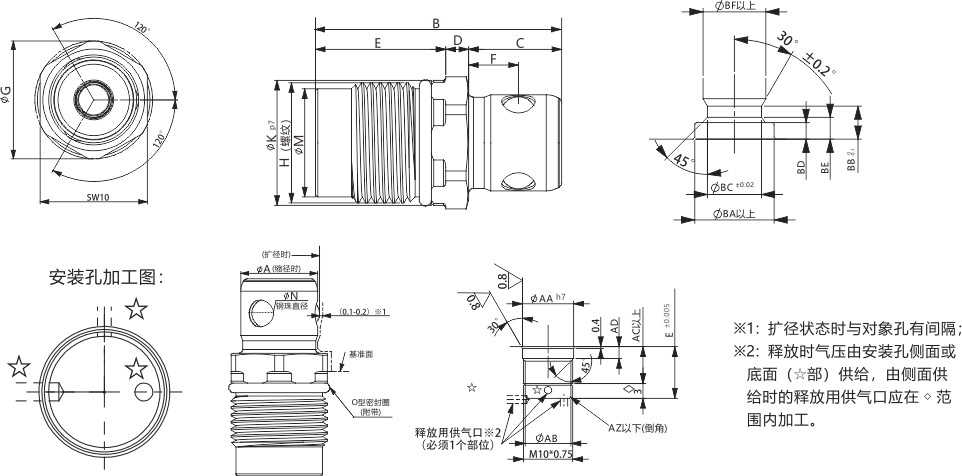
| Número | Ampliación y reducción del tamaño del diámetro | B | C | D | E | F | G | H (nominal* pitch) | K | M | N | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Una expansión | una reducción | |||||||||||
| MST-M10 |
8 0 -0,05 |
9.3 | 20.5 | 8 | 2 | 10.5 | 4.5 | 11 |
M10*0,75 |
10.4 0.036 0.018 |
9 | 3 |
| MST-M12 | 10 0 -0,05 | 11.5 | 22.5 | 9 | 2.5 | 11 | 5 | 13.5 |
M12*1 |
12.4 0.036 0.018 |
10.7 | 3.5 |
| MST-M14 | 12 0 -0,05 | 13.8 | 25 | 10 | 3 | 12 | 5.5 | 15.5 |
M14*1 |
14.4 0.036 0.018 |
12.7 | 4 |
| MST-M18 | 16 0 -0,05 | 18.2 | 29.5 | 11.5 | 4 | 14 | 6.5 | 21.2 |
M18*1,5 |
19.4 0.043 0.022 |
16.1 | 5 |
| Número de dimensión | Automóvil club británico | AB | C.A. | ANUNCIO | AZ (chaflán) | licenciado en Letras | CAMA Y DESAYUNO | ANTES DE CRISTO | BD | SER |
novio |
|---|---|---|---|---|---|---|---|---|---|---|---|
| MST-M10 |
10.4 0.018 0 |
9.3 0.07 -0,11 |
7.5 | 2.4 | 0.2 | 12 | 5 | 8.2 | 2.5 | 3.3 |
9.5 |
| MST-M12 |
12.4 0.021 0 |
11 0.15 -0,08 |
8 | 2.4 | 0.4 | 14.5 | 5.8 | 10.2 | 3 | 4.6 | 11.7 |
| MST-M14 |
14.4 0.018 0 |
13 0.15 -0,08 |
9 | 2.8 | 0.4 | 17 | 6.45 | 12.2 | 3.5 | 4.9 | 14.2 |
| MST-M18 |
19.4 0.021 0 |
16.5 0.17 -0,12 |
10.5 | 3.8 | 0.4 | 23 | 8 | 16.2 | 4.5 | 6.5 | 18.6 |
Marketing Para El Mundo.
Si está interesado en nuestros productos, consúltenos
- Dirección: 1-4 Floors, 17#03, Building 17, No. 269, Xinfeng Road, Xukou Town, Wuzhong District, Suzhou City
- Fax: +86-18112607008
- Teléfono: 18051849209
- Correo Electrónico: [email protected]


